
I principali tipi di navigazione AGV (o sistemi di guida AGV) per i veicoli a guida automatica sono i seguenti:
- Navigazione Laser
- Navigazione a Riconoscimento dei Contorni
- Navigazione Filoguidata
- Navigazione a Magneti
- Navigazione a Banda Magnetica
- Navigazione a Banda Colorata
- Navigazione a QR Code
- Navigazione GPS
- Navigazione Combinata
Questo breve articolo si prepone di illustrare, in maniera sintetica e chiara, i vari tipi di navigazione AGV utilizzati per muoversi in un layout.
Navigazione Laser
In questi paragrafo daremo una spiegazione di massima del più utilizzato sistema di guida AGV: La navigazione laser (o guida laser), generalmente i veicoli a guida automatica che utilizzano questa tecnologia sono noti come LGV (Laser Guided Vehicles).
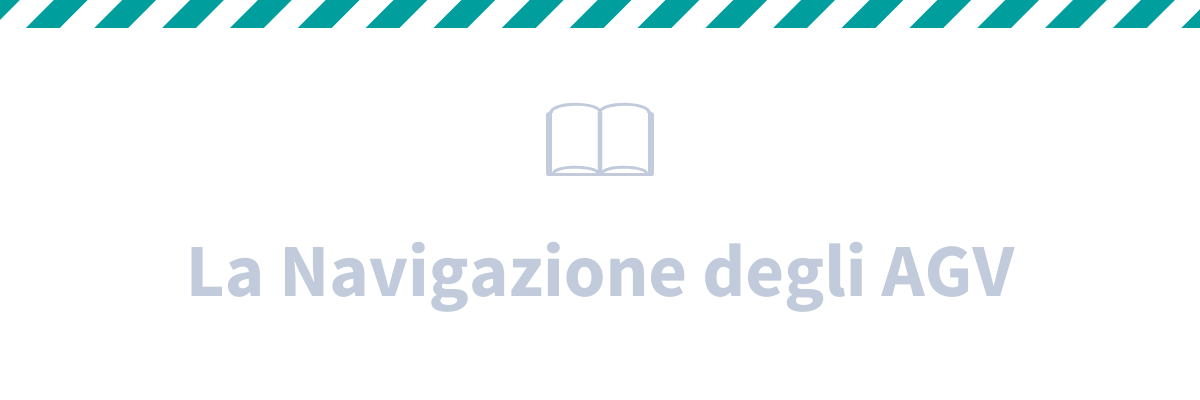
Come prima cosa è importante capire che la navigazione dell’AGV sfrutta la teconologia del dead reckoning grazie agli encoder incrementali e assoluti montati sulla o sulle moto-ruote del veicolo, e utilizza la triangolazione laser per correggere l’errore del dead reckoning in modo tale da avere una precisione massimo della navigazione.
Il dispositivo, ad esempio Il NAV350 della SICK, è dotato di un emettitore rotante di raggi infrarossi che “rimbalzano” su degli speciali riflettori, ritornando alla sorgente che li ha emessi. I riflettori sono generalmente dei cilindri metallici ricoperti di un materiale catarifrangente. Possono anche essere piatti. Vengono montati sulle pareti e sulle strutture del layout in cui l’AGV dovrà muoversi e l’AGV dovrà essere sempre in grado di vederne come minimo tre, per poter effettuare un calcolo di triangolazione della sua posizione nello stabilimento. La sua posizione è composta da tre variabili X, Y e un angolo rispetto alla X che identifica la direzione dell’AGV.
I punti di forza di questa tecnologia sono i seguenti:
- Facilità di installazione
- Costi di installazione ridotti
- Flessibilità dei percorsi possibili
- Velocità delle modifiche al layout
- Costi di intervento ridotti
- Affidabilità
- Precisione millimetrica
- Alta versatilità
- L’AGV capisce da solo dove si trova quando viene acceso.
- Adatto ad ambienti dove i percorsi degli AGV cambiano molto spesso.
Navigazione a Riconoscimento dei Contorni
Questo paragrafo si occuperà della navigazione a riconoscimento dei contorni, uno dei principale tipi di guida in uso al giorno d’oggi grazie alla sua versatilità.
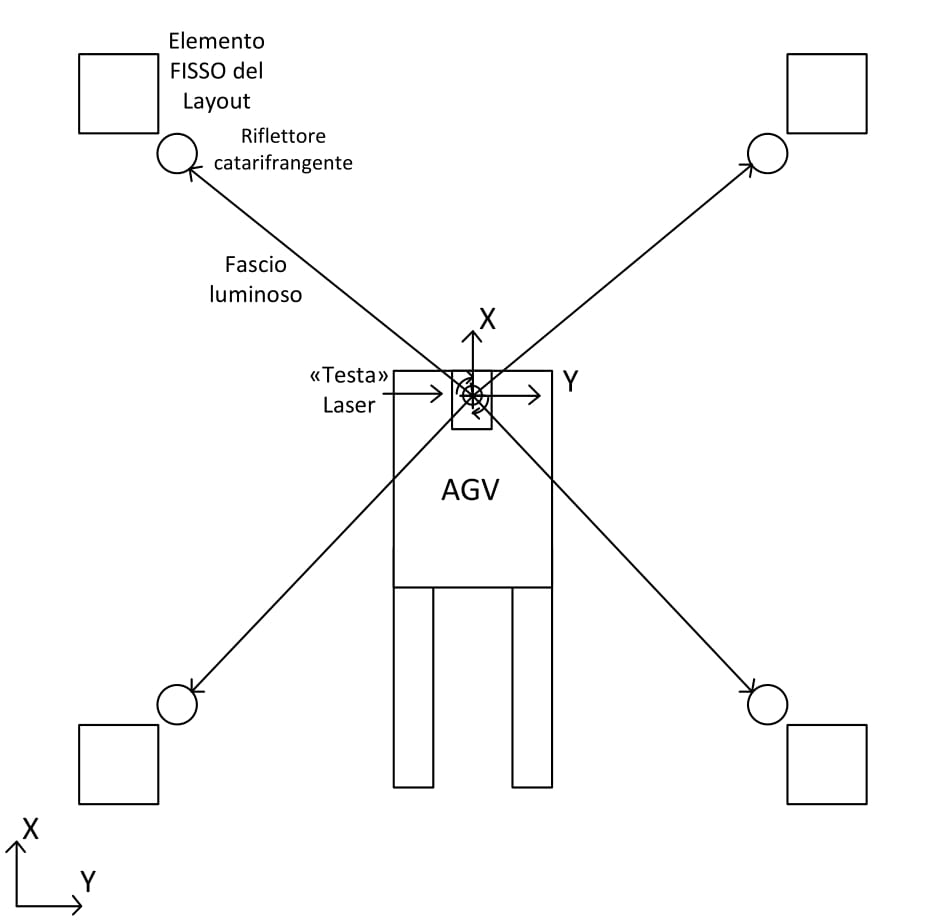
La navigazione a riconoscimento dei contorni, detta anche Contour Navigation o Natural Navigation, sfrutta il fascio laser generato da uno scanner Safety, come ad esempio un SICK S300, per riconoscere elementi noti di un layout in cui l’AGV deve muoversi. Generalmente in fase di progettazione dell’impianto AGV, un tecnico “insegna” all’AGV dove dovrebbero trovarsi in un piano cartesiano X Y determinati ingombri con specifiche forme, in modo tale che l’AGV possa riconoscerle e “capire” con una certa confidenza in che punto del layout si trova.
E’ importante considerare che lo scanner di sicurezza manterrà inalterate le sue funzioni Safety anche se viene utilizzato per la navigazione dell’AGV. Non è quindi necessario aggiungere nessun dispositivo dedicato alla sola navigazione dell’AGV.
La posizione calcolata dall’AGV contiene le informazioni bi-dimensionali X Y e l’angolo rispetto all’asse X che indica il senso di marcia.
I punti di forza di questo tipo di navigazione sono i seguenti:
- Nessuna (o minima) infrastruttura aggiuntiva necessaria (riflettori, pali, nastri colorati, ecc..).
- Nessun dispositivo aggiuntivo necessario sull’AGV.
- Costi molto ridotti.
- Semplicità di impiego.
- Alta versatilità.
- Estrema semplicità di modifiche ai percorsi.
- Adatto ad ambienti dove i percorsi degli AGV cambiano molto spesso.
Esistono anche dei contro che sono i seguenti:
- Il layout non deve mai cambiare.
- Non è possibile appoggiare oggetti dove l’AGV si aspetta di vedere altro.
- La distanza di visione dello scanner è limitata rispetto a quella laser.
- Potrebbe essere necessario aggiungere oggetti per rendere univoci corridoio molto lunghi.
Navigazione Filoguidata
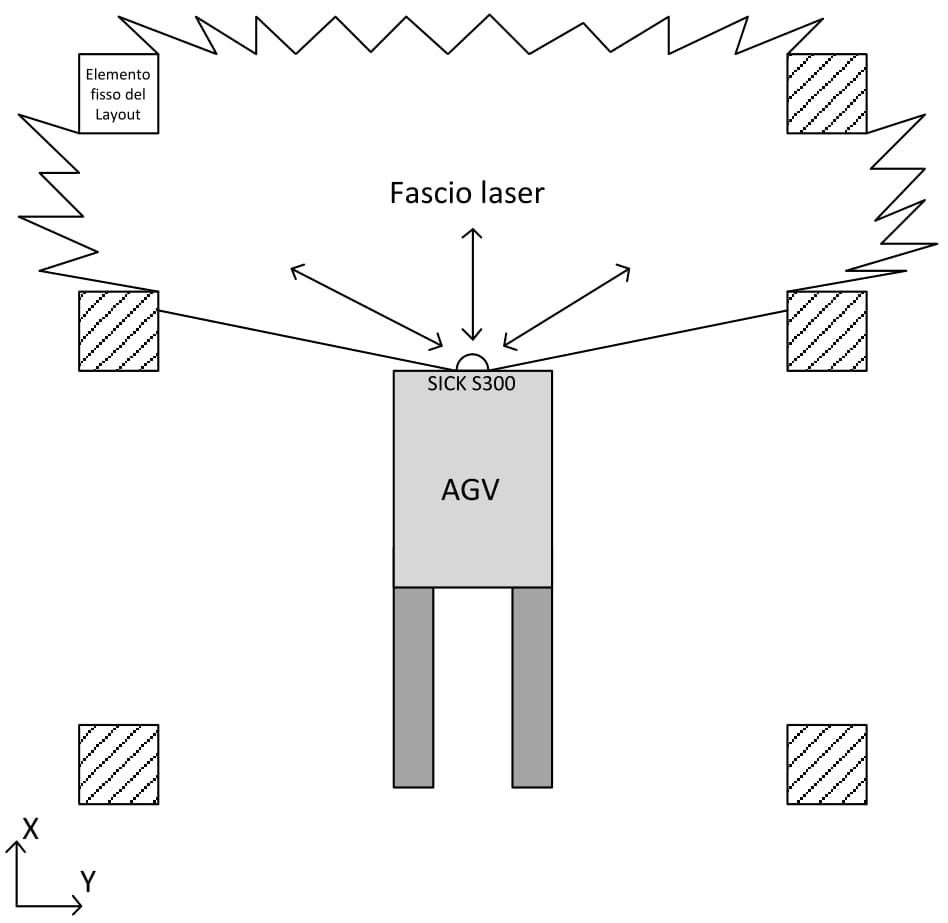
Questo speciale tipo di guida si avvale di un antenna, montata sotto l’AGV, generalmente davanti alla moto-ruota, che rileva specifiche frequenze generate da un cavo annegato nel pavimento e non visibile. Le frequenze vengono generate da uno o più generatori di frequenza. Ogni frequenza identifica uno specifico percorso e ogni tot metri (di solito ogni due o tre metri) è presente una piastra metallica contenente un TAG RFID, che identifica un punto notevole dell’impianto, atto ad aiutare l’AGV a capire se si trova nel posto corretto al momento giusto.
L’AGV quindi segue la traccia grazie all’antenna e si avvale delle piastre metalliche per capire se sta andando nel verso corretto, non avendo altri sistemi di riferimento.
Anche in questo caso l’AGV comunica al sistema tre variabili che ne identificano la posizione nel piano cartesiano X Y e un angolo rispetto alla X che indica il senso di marcia. In questo specifico caso le coordinate intermedie tra un punto notevole e l’altro sono calcolate grazie a un algoritmo e non sono rilevate con sensori.
Questo sistema di guida, seppure sta cadendo in disuso per far spazio a tecnologie più recenti, come quella laser, ha comunque i suoi punti di forza:
- Alta affidabilità dei percorsi.
- Alta precisione nel posizionamento.
- Costi dei dispositivi contenuti.
- Possibilità di essere installato in ambienti sporchi, dove non è possibile una navigazione ottica.
- Utile in corridoi molto lunghi.
- Adatto ad ambienti dove i percorsi degli AGV non cambiano mai, o molto di rado.
Presenta comunque dei punti a sfavore:
- Costo oneroso di installazione.
- Costo oneroso per ogni modifica.
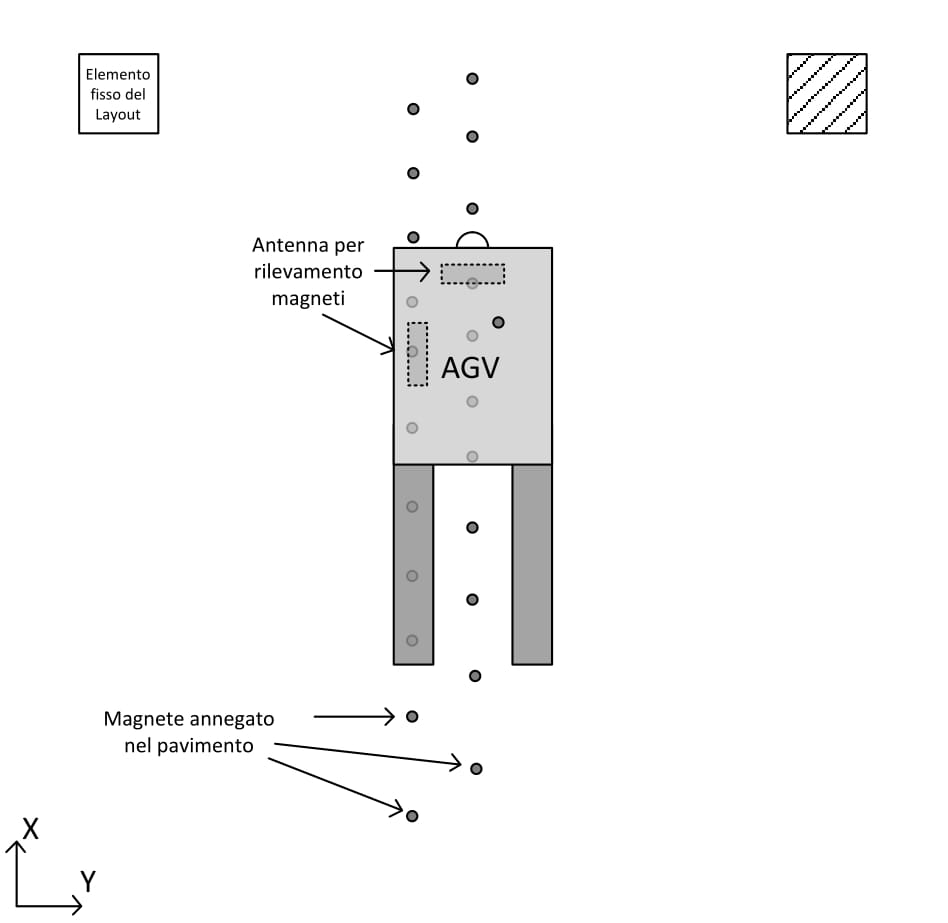
Navigazione a Magneti
Il sistema di guida a magneti, detto anche a guida a spot, permette all’AGV di navigare in un layout grazie alla presenza di piccoli magneti cilindrici, generalmente lunghi un paio di centimetri al massimo, annegati nel pavimento e coperti da una speciale resina. L’AGV è dotato di sensori, montati sotto di esso, che rilevano la presenza di questi magneti, disposti secondo una determinata sequenza, in modo tale che l’AGV posso verificare se la direzione che sta seguendo è quella corretta. L’AGV viaggia quindi a dead-reckoning, e corregge la traiettoria controllando la posizione dei magneti che rileva.
Possono essere necessari centinaia di magneti per completare un impianto, ma questo sistema di guida è molto utile in ambienti sporchi, molto grandi o molto “simmetrici” in cui non è possibile usare metodi di guida ottica.
Generalmente è necessario più di un sensore per poter sfruttare questa tecnologia in modo accurato.
Può essere pratica comune invertire la polarità di alcuni magneti per determinare punti notevoli dell’impianto.
I punti a favore della navigazione a magneti sono i seguenti:
- Semplicità di installazione.
- Costi di installazione contenuti.
- Costi materiale contenuti.
- Più versatile rispetto alla navigazione filoguidata.
- Altissima precisione nel posizionamento dell’AGV.
- Adatto ad ambienti sporchi.
- Installabile outdoor.
- Miglior alternativa a sistema di guida ottici.
- Adatto ad ambienti dove i percorsi degli AGV non cambiano mai, o molto di rado.
I contro sono i seguenti:
- Scarsa versatilità seppure maggiore rispetto ad altri sistemi.
- L’installazione richiede opere di muratura, seppur minime, per piazzare i magneti.
- Manutenzione dell’impianto più impegnativa.
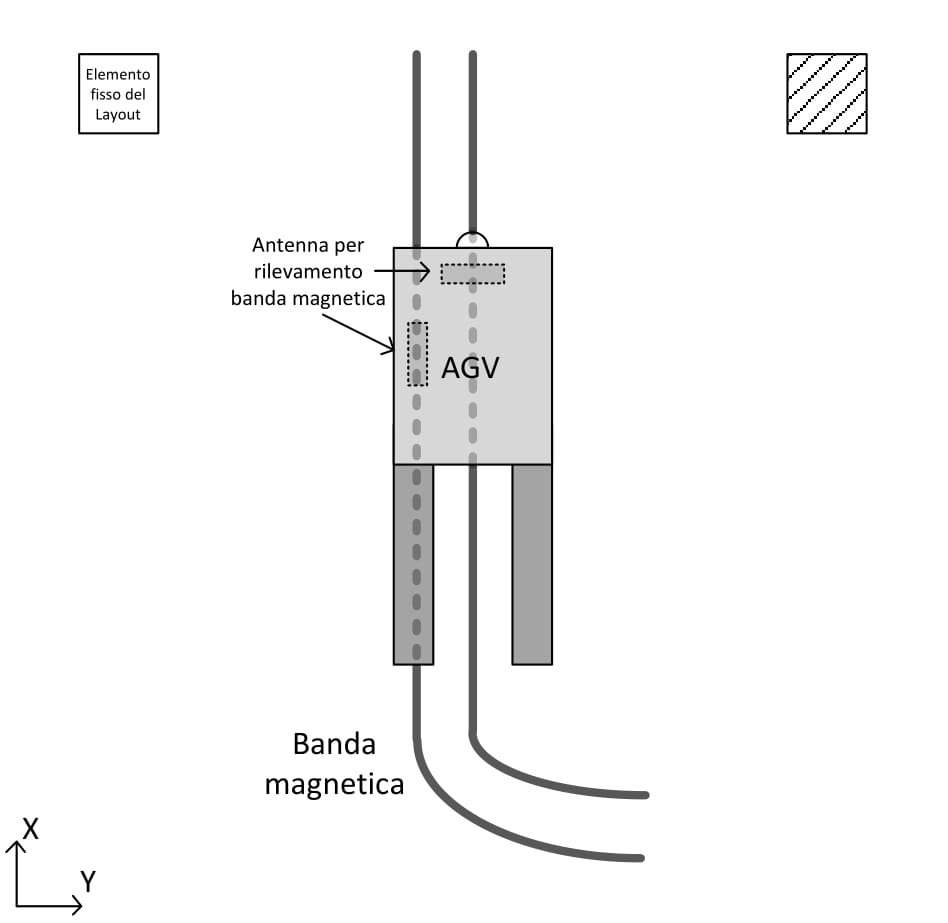
Navigazione a Banda Magnetica
La navigazione a banda magnetica sfrutta principi analoghi a quella a magneti, o a spot, con la differenza che i magneti non sono annegati nel pavimento, ma viene incollata una banda magnetica sul pavimento che viene seguita grazie ai sensori piazzati sotto l’AGV.
Punti a favore:
- E’ un sistema di semplicissima installazione.
- I costi sono molto contenuti.
- I costi per le modifiche sono molto contenuti.
- Si riduce anche il costo dell’AGV.
- Le modifiche sono semplici.
- Adatto ad ambienti dove i percorsi degli AGV cambiano molto spesso.
Invece i contro sono i seguenti:
- Più delicato rispetto a una navigazione tradizionale a magneti annegati.
- Poco versatile.
- Non molto precisa.
- Manutenzioni frequenti potrebbero essere necessarie.
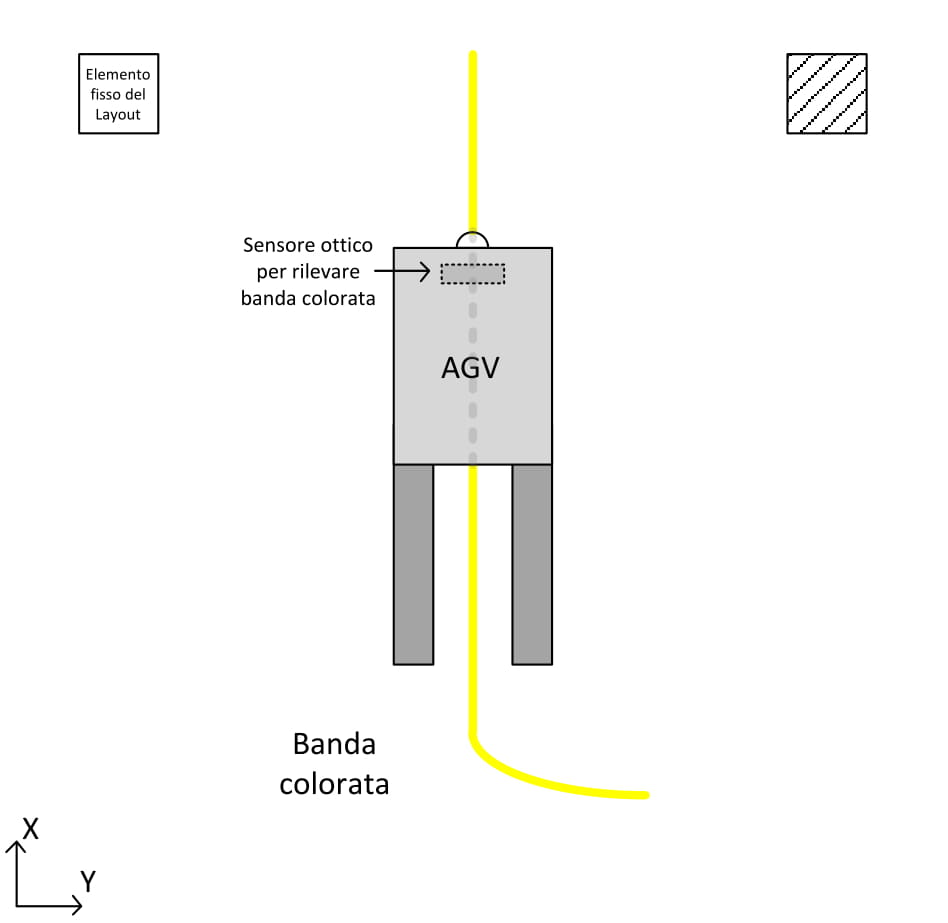
Navigazione a Banda Colorata
La navigazione a banda colorata (o a nastro colorato) permette, tramite l’utilizzo di una speciale telecamera montata sotto l’AGV, di navigare all’interno di un layout seguendo tale guida. Possono essere installati diversi colori in modo tale da indicare all’AGV come percorrere quel determinato tratto di percorso o se scegliere un percorso o un altro ad esempio a un bivio.
E’ richiesta poca manutenzione ma comunque va mantenuta piuttosto integra per poter permettere all’AGV di operare in sicurezza ed efficienza.
Questo metodo di navigazione è molto semplice e non permette di costruire layout molto complessi, ma permette di mantenere costi di AGV e impianto il più basso possibile.
Pro:
- Semplicità di installazione.
- Veloce manutenzione.
- Costi di installazione minimi.
- Costi di manutenzione minimi.
- Ridotto costo degli AGV.
Contro:
- Poco versatile.
- Manutenzione frequente potrebbe essere richiesta.
- Limiti tecnologici per impianti complessi.
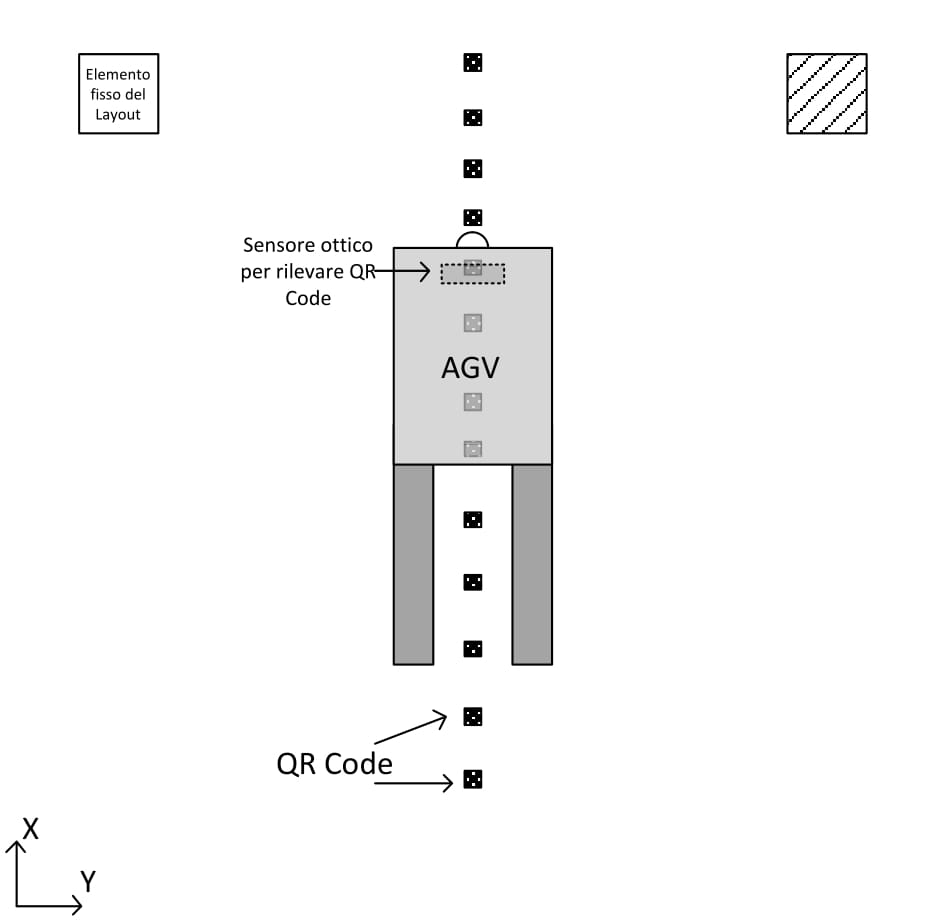
Navigazione a QR Code
La navigazione a QR Code sfrutta lo stesso dispositivo utilizzato nella navigazione a banda colorata ma invece del nastro vengono piazzati a terra dei QR code che contengono le informazioni di quel punto notevole del layout. In questi punti notevoli l’AGV intraprende diverse azioni in base a quanto scritto nel QR.
Quindi questo tipo di guida è molto semplice ed è adatto a magazzini segregati dove gli AGV compiono rotte sempre uguali e senza variazioni. E’ utile sapere che è particolarmente indicato nel caso in cui gli AGV effettuino movimenti “a griglia”, come nei magazzini Amazon.
Pro:
- Semplicità di installazione.
- Veloce manutenzione.
- Costi di installazione minimi.
- Costi di manutenzione minimi.
- Ridotto costo degli AGV.
Contro:
- Poco versatile.
- Manutenzione frequente potrebbe essere richiesta.
- Limiti tecnologici per impianti complessi.
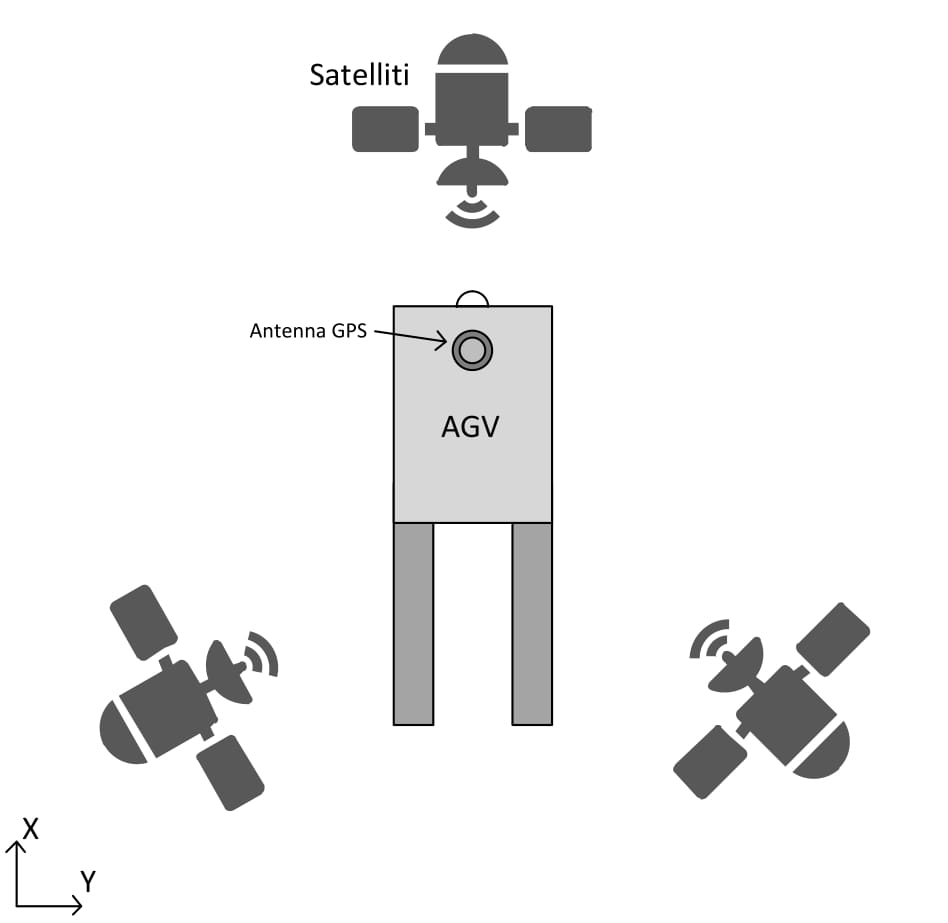
Navigazione GPS
Grazie alla navigazione GPS, gli AGV possono muoversi anche in ambiente esterno, sfruttando il principio della triangolazione GPS, analogamente a quanto fa con la navigazione laser indoor.
E’ chiaro che la precisione sarà ridotta rispetto a un sistema laser ma per determinate applicazioni potrebbe essere sufficiente, ad esempio per l’automazione di mezzi agricoli.
Navigazione Combinata
La navigazione combinata permette di generare una guida ibrida tra qualsiasi tipo di navigazione, ad esempio navigazione laser + magneti, laser + filoguidata o addirittura riconoscimento dei contorni + magneti. Non ci sono limitazioni nella scelta delle navigazioni da combinare in base alle esigenze.
In altre parole, se ad esempio un AGV sfruttasse la navigazione laser ma dovesse percorrere una tratta in cui non è possibile installare riflettori catarifrangente, in quella specifica porzione di layout si potrebbe optare per una navigazione a magneti o a riconoscimento dei contorni.
O ad esempio se un AGV dovesse percorrere un lungo corridoio invece di piazzare moltissimi riflettori si potrebbero usare dei magneti.
Non aspettare, CONTATTACI subito per una consulenza gratuita e senza impegno, ti aiuteremo a capire qual’è la soluzione più adatta alla tua attività!