
Questo articolo si prepone di dare una idea di massima di come è composto un sistema AGV, i suoi obbiettivi e i vantaggi di un sistema AGV rispetto a un sistema manuale.
Generalmente un sistema AGV è composto da vari macrolivelli che possono essere elencati come:
- Il layout di stabilimento.
- La flotta AGV, composta da uno o più AGV.
- Le infrastrutture di stabilimento ( stazioni di lavoro, porte, attrezzature, ecc)
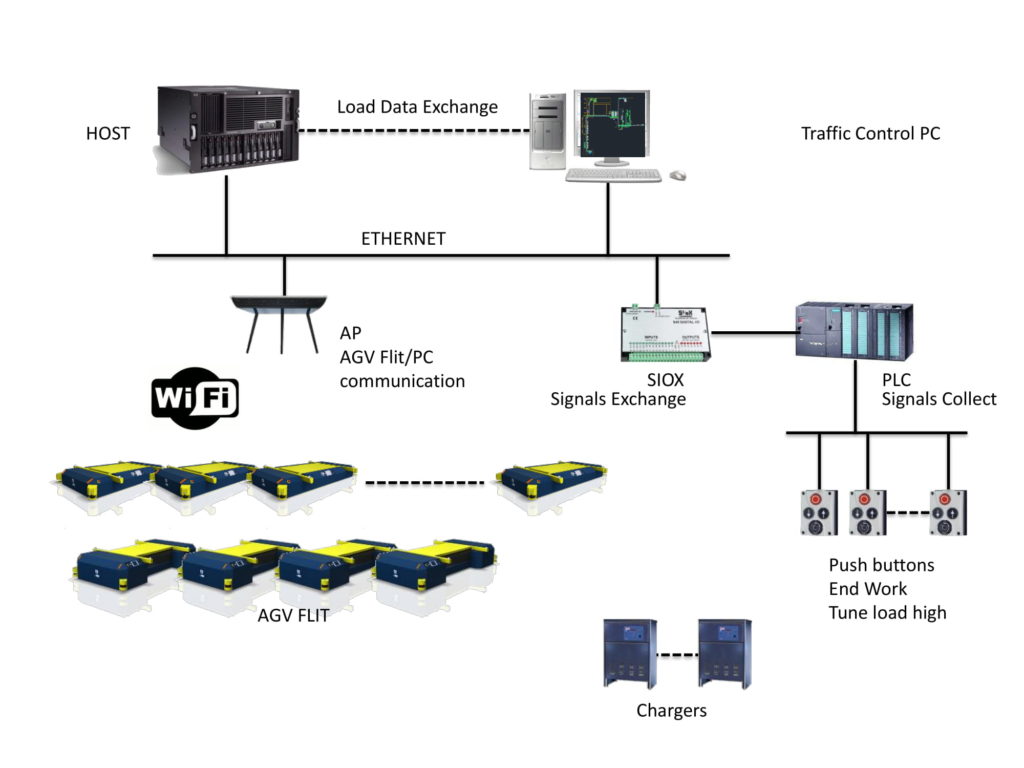
- La rete, dedicata o aziendale (Ethernet e Wi-Fi).
- Il software di controllo e il suo hardware (server, database, ecc).
- Il software di stabilimento (ERP, SAP, ecc).
Tutti questi elementi vanno a costituire il sistema AGV nella sua interezza, e qui di seguito verranno riassunte le principali caratteristiche di ogni livello.
1. Il layout di stabilimento
Con layout di stabilimento si intende quel livello del sistema AGV che comprende lo spazio dedicato, del tutto o in parte, alla flotta di veicoli automatici e alle sue operazioni. Si può trattare di un ambiente segregato o in cui possono operare anche uomini. Non ci sono limiti di applicazione, in quanto gli AGV possono operare in magazzini logistici, in linee di produzione, in linee di confezionamento e così via. Non ci sono limitazioni nemmeno dal punto di vista dell’ambito produttivo. I nostri sistemi spaziano dall’industria alimentare a quella tessile, da quella Automotive (industria automobilistica) a quella farmaceutica.
In fine il layout dovrà essere strutturato in modo tale da poter accogliere gli AGV in modo tale che possano operare in sicurezza. E’ molto importante che il pavimento sia in ottime condizioni, preferibilmente in resina o cemento industriale.Non possono essere presenti pendenze superiori al 2%. Devono essere garantiti spazi minimi per mantenere in sicurezza eventuali operatori che lavoreranno nello stesso spazio degli AGV. Il layout dovrà quindi essere adatto alla navigazione degli AGV, che sarà scelta in base alle esigenze caso per caso.
2. La Flotta AGV
La flotta AGV non nient’altro che l’insieme degli AGV che opereranno nel sistema. Può essere composta da AGV di diversi tipi, ad esempio AGV a forche e AGV a traino e tutto sarà gestito dallo stesso sistema di controllo del traffico.
Gli AGV si muoveranno all’interno del layout di stabilimento seguendo dei percorsi prestabiliti che saranno decisi pezzo per pezzo dal sistema di controllo.
Ogni AGV sarà dotato in un access point per poter comunicare con il sistema di controllo.
Ogni AGV sarà dotato di dispositivi di sicurezza che permetteranno di operare garantendo l’integrità delle persone e dei prodotti che si trasportano.
3. Le Infrastrutture di Stabilimento
Le infrastrutture di stabilimento sono la parte del sistema AGV che comprende tutto ciò che compone l’ambiente in cui opereranno ed eventualmente interagiranno i veicoli a guida automatica.
Fanno parte delle infrastrutture tutte le macchine di produzione, le stazioni di lavoro, le eventuali porte, le postazioni pallet di un magazzino, le linee di montaggio e di confezionamento e così via.
Le infrastrutture possono essere di due tipi: attive e passive.
3.1 I tipi di infrastruttura
Le infrastrutture attive sono di solito cablate e controllate da un PLC (Programmable Logic Controller) di stabilimento che ne controlla lo stato e ne gestisce attuatori e componenti. Il PLC comunicherà in modo diretto o indiretto con il sistema di controllo che potrà capire cosa comandare agli AGV.
Ad esempio se un AGV dovesse accedere ad un area protetta da una porta, il sistema di controllo farà una richiesta al PLC di aprire la porta. Quando la porta sarà aperta il PLC comunicherà al sistema di gestione lo stato della porta, il quale comanderà all’AGV di passare. Una volta passato il sistema di controllo notificherà al PLC che può nuovamente chiudere la porta. In modo più semplice si potrebbe anche immaginare una rulliera da cui gli AGV attingono pallet di prodotto finito. Se la rulliera fosse cablata a un PLC quest’ultimo potrebbe notificare al sistema di controllo degli AGV che un pallet è arrivato ed è pronto per essere prelevato. Le applicazioni sono molteplici per non dire infinite.
Le infrastrutture passive sono invece tutte quelle che non sono controllate da PLC o altri sistemi di controllo. Ad esempio una baia di deposito temporanea per pallet, in cui il sistema di controllo deposita materiale di cui per qualche ragione non conosce l’origine o la destinazione, in attesa che un operatore decida cosa fare del prodotto. Sarà compito del sistema di gestione del traffico, o del MES (Manufacturing Execution System), in base ai casi, di tenere traccia di queste posizione passive, ad esempio all’interno di un database.
4. La rete
La rete è il mezzo tramite il quale il sistema di controllo del traffico del sistema AGV può dialogare con la flotta di veicoli automatici, per inviare comandi e riceverne lo stato, e tramiti il quale può dialogare con eventuali PLC e ERP (Enterprise Resource Planning) di stabilimento.
Gli AGV comunicano generalmente con il sistema di controllo tramite Access Point, ma in passato la comunicazione poteva avvenire anche tramite lampade a infrarossi o radio.
Il sistema di controllo comunica con gli altri sistemi aziendali, se esistono, e con eventuali PC client, tramite Ethernet o tramite WI-FI.
La rete AGV e gli AP che la compongono può essere sia dedicata che aziendale. Gli AGV possono tranquillamente convivere con altri dispositivi in rete in quanto il traffico che scambiano è molto poco e leggero, e tutto ciò di cui hanno bisogno è un indirizzo IP.
5. Il Software di Controllo del Traffico
Il software di controllo del traffico è il cuore pulsante del sistema AGV.
Si occupa di gestire la flotta AGV, di interfacciarsi con gli altri sistemi e di generare report e log del sistema.
Viene sviluppato ad-hoc per l’applicazione, in quanto non esistono due sistemi AGV uguali. Ognuno avrà le sue esigenze specifiche, mirate al raggiungimento di un obbiettivo piuttosto che a un altro.
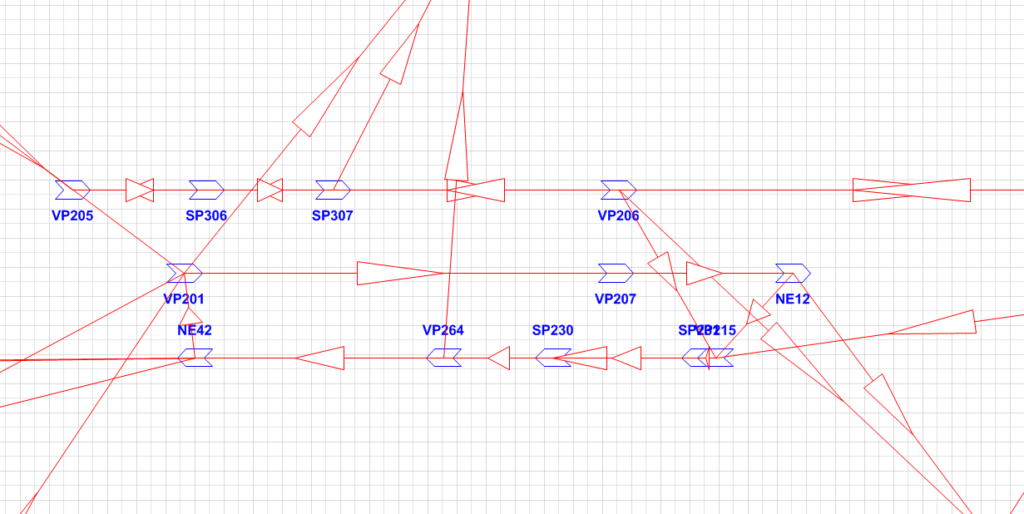
La gestione degli AGV avviene tramite wireless è il sistema di controllo si occupa di comandarne, un segmento alla volta, il percorso.
Il calcolo dei percorsi avviene grazie un algoritmo che estrae il tracciato più breve analizzando i rami di un grafo pesato.
Il principale scopo del sistema di controllo è quello di assegnare ordini agli AGV, o meglio decidere qualche AGV è il più adatto a svolgere un determinato compito, in base a vari fattori come vicinanza e livello di carica della batteria.
Il sistema gestisce in modo dinamico il traffico tra AGV impedendo che essi vadano a collidere tra di loro, riservando delle aree al transito di un AGV piuttosto che di un altro, seguendo dei criteri prestabiliti nel grafo pesato di cui sopra.
Inoltre è compito del sistema occuparsi del livello di carica delle batterie degli AGV, in modo tale da preservarne lo stato e per rendere operativi i veicoli più a lungo possibile.
6. Il Software di Stabilimento
In alcuni casi al livello più alto, o parallelamente al livello del sistema di controllo AGV, si piazza il software di stabilimento, generalmente un MES (come quelli sviluppati da Siemens) o un ERP (come ad esempio SAP). I software di stabilimento potrebbero dover comunicare, in maggiore o minor misura con il sistema di controllo degli AGV, secondo un protocollo ben definito in fase di progettazione. Gli scopi di questa comunicazione tra sistemi possono essere molteplici. Se ad esempio ci fosse un WMS (Warehouse Management System) di terzi, quest’ultimo potrebbe avere la necessità di generare chiamate da e verso il magazzino, comunicando al sistema AGV che ci sono prodotti da prelevare in uscita o prodotti da depositare in ingresso, fornendo sempre una sorgente e una destinazione note al sistema di controllo degli AGV.
Un altro utilizzo tipico di questa soluzione è il caso in cui il sistema di controllo deve comunicare al sistema di stabilimento reportistica sull’andamento del sistema.
Ad ogni modo le possibili applicazioni sono molteplici e si differenziano da sistema a sistema.