Il mondo della robotica sta vivendo un’evoluzione accelerata, e la crescente domanda di sistemi scalabili e innovativi sta guidando questa trasformazione. Immaginate un sistema in grado di ospitare veicoli a guida autonoma (AGV) di diversi produttori, consentendo loro di operare in modo sincronizzato sotto un unico sistema di controllo. Questo scenario è particolarmente rilevante nell’industria automobilistica, dove la necessità di flessibilità nei sistemi AGV è sempre più critica.
In ambito automobilistico, le operazioni che una volta richiedevano intervento manuale o erano vincolate a impianti rigidi stanno diventando sempre più automatizzate. Questa automazione non solo garantisce efficienza, ma anche sicurezza nelle operazioni. Per affrontare questa sfida, l’Associazione Tedesca per l’Industria Automobilistica (VDA – Verband der Automobilindustrie) ha sviluppato il protocollo di comunicazione standard VDA 5050.
Questo protocollo consente a veicoli di diversi produttori di operare in modo armonico sotto lo stesso sistema di controllo. L’obiettivo è liberare le aziende dall’essere vincolate a un unico fornitore e garantire che, anche in caso di necessità di veicoli aggiuntivi, la produzione non venga interrotta.
Scarica il PDF ufficiale (in lingua inglese).
Che cos’è il protocollo VDA 5050?
VDA 5050 è uno standard che riguarda la comunicazione tra veicoli a guida autonoma (o automatica) (AGV) e un sistema di controllo principale utilizzato nei processi di intralogistica nell’industria automobilistica. L’obiettivo principale di questa interfaccia è semplificare il collegamento dei nuovi veicoli AGV a un sistema di controllo già esistente, consentendo inoltre il funzionamento simultaneo di diversi tipi di AGV. L’obiettivo finale è aumentare la flessibilità e l’efficienza in queste operazioni.
Tuttavia, è importante notare che l’interfaccia VDA 5050 si concentra principalmente sulla scambio di informazioni relative agli ordini e allo stato dei veicoli. Non gestisce altri aspetti come la configurazione della mappa o la comunicazione con dispositivi periferici.
Per quanto riguarda i requisiti e la definizione del protocollo, l’interfaccia si basa sul protocollo MQTT con una struttura dati in formato JSON. Questo consente una comunicazione affidabile e asincrona su reti wireless. Inoltre, supporta diverse funzionalità, tra cui il controllo del traffico, la gestione dell’energia e la gestione degli errori per gli AGV.
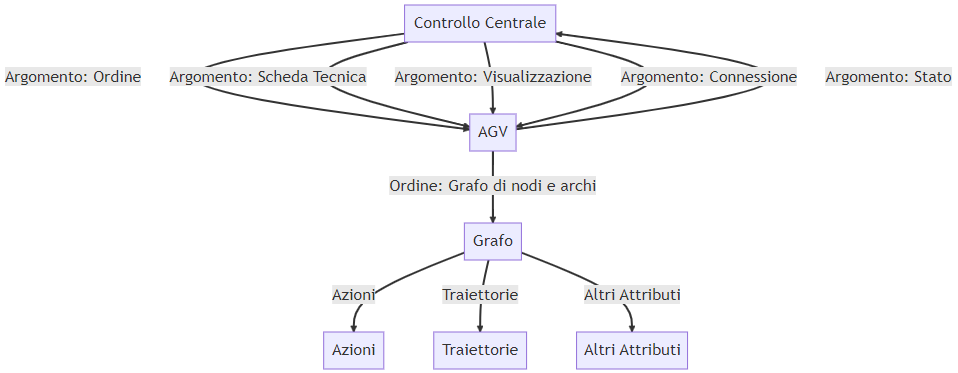
Nel processo di comunicazione, vengono definiti ruoli e responsabilità chiari per l’operatore, il sistema di controllo principale e gli AGV stessi. L’operatore fornisce informazioni di base come percorsi, stazioni e specifiche del veicolo. Il sistema di controllo principale si occupa dell’organizzazione degli ordini, dei percorsi e del coordinamento degli AGV, mentre gli AGV eseguono gli ordini e comunicano costantemente il loro stato.
Le specifiche del protocollo includono dettagli sugli argomenti di comunicazione, come ordini, stato, scheda tecnica, visualizzazione e connessione. Inoltre, definiscono la struttura e gli attributi dei vari elementi utilizzati per descrivere gli ordini e gli stati, come nodi, segmenti, azioni, traiettorie, e altro.